Write up experiments and research with LaTeX templates for project and lab reports—including layout guidelines to help guide you through the writing process.
最近的
Para fazer um capítulo da apostila do CB
This document aims to help any Chemical Engineer students in his entire career to fully ensure and follow the guidelines of the department (UCR, 2021).
This template can be used by the students who are doing CSE 499 at the University of Liberal Arts Bangladesh for preparing their Thesis/Capstone Project reports.
北京理工大学自动化学院开题报告模板
A template for a paper for the university of Birmingham. With easy customisation for beginners! Already includes referencing and appendix.
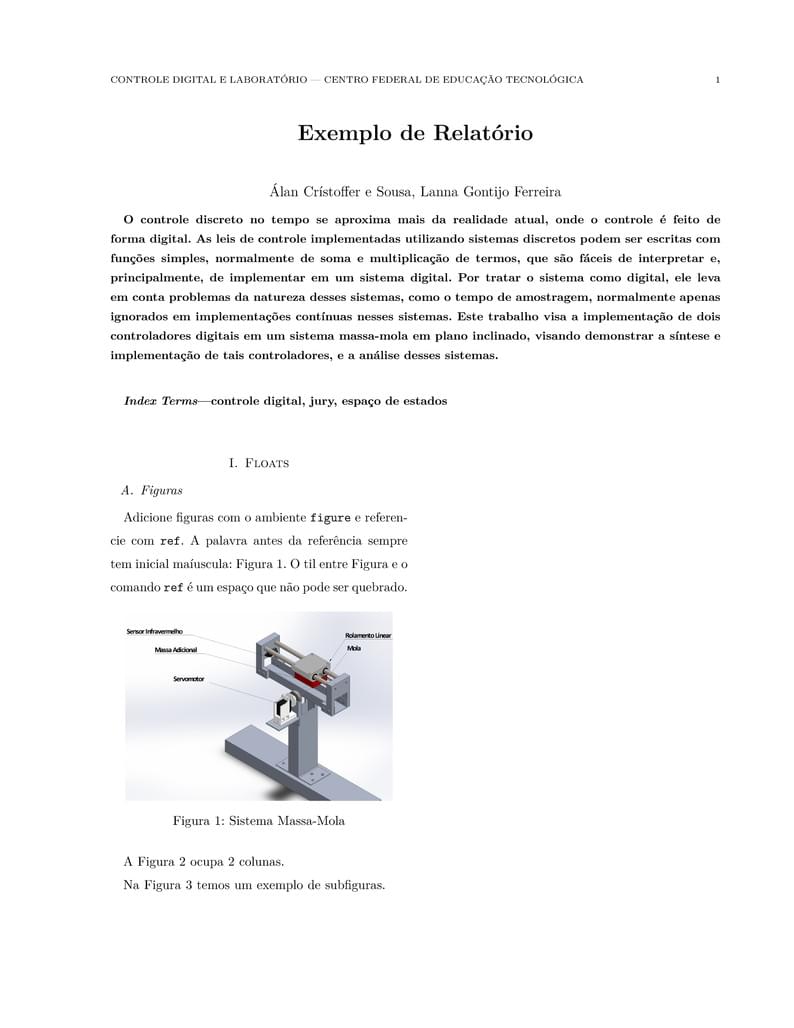
Modelo de relatório comumente utilizado no curso de Engenharia Mecatrônica do CEFET-MG campus V.
Sleek Template is a minimal collection of LaTeX packages and settings that ease the writing of beautiful documents. While originally meant for theses, it is perfectly suitable for project reports, articles, syntheses, etc. – with a few adjustments, like margins. It is composed of four separate packages – sleek, sleek-title, sleek-theorems and sleek-listings – each of which can be used individually.
Modelo não-oficial
A simple and aesthetic technical report template that is both easy to use and to customize. It is specifically designed to fit the Norwegian University of Science and Technology’s (NTNU) engineering programs, but the logos and such can effortlessly be changed. Suitable for projects and general assignments. This is a student development.