最近的
Informe 1


Lecturas de la clase de Elemento Finito impartida en la Carrera de Matemática de la Universidad Nacional Autónoma de Honduras

Laboratorio de Fisica.
CGI vs JSP
TRABAJO HECHO PARA LA MATERIA DE ADMINISTRACIÓN DE SISTEMAS OPERATIVOS
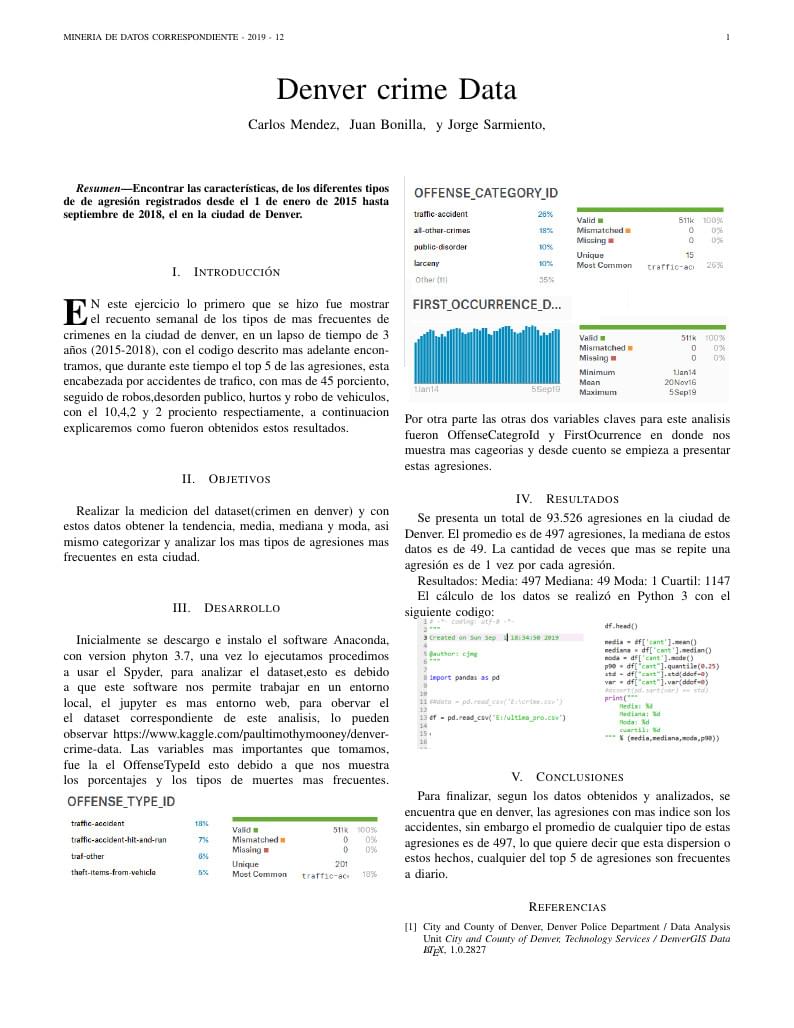
Encontrar las características, de los diferentes tipos de de agresión registrados desde el 1 de enero de 2015 hasta septiembre de 2018, el en la ciudad de Denver.
TRABAJO REALIZADO PARA LA MATERIA DE ANÁLISIS Y DISEÑO DE SISTEMAS

In this practice, the student will implement a four-bit counter using the 74LS193 Integrated circuit (IC), and the NE555 IC as clock signal.