Overleaf 模板库社区文章 — Recent
论文、演示文稿、报告等,以 LaTeX 编写并由我们的社区发布。

Humanoid robots: Will they ever be able to become like us, and if so, do we want this happen?

An Empirical Research Study On Mobile Ad-Hoc Networks: Issues and Challenges on its Routing and Security Provisioning Protocols
Created using the Medium Length Graduate Curriculum Vitae LaTeX Template Version 1.1 (9/12/12) downloaded from http://www.LaTeXTemplates.com. Original author of template: Rensselaer Polytechnic Institute
laboratorio 2 de calculo vectorial ESCUELA COLOMBIANA DE INGENIERIA JULIO GARAVITO
Our solution for MCM2015
In this paper we develop an original approach to evaluate the costs and benefits associated to a generic promotion program using an application to Bordeaux wines. The benefit is computed from the marginal impact of the collective reputation of the program on the individual reputation of its members. These different marginal impacts are estimated using detailed survey data about the image of Bordeaux wines in seven European countries. We find positive and significant spillover effects from the umbrella reputation (Bordeaux) that moreover increase with the individual reputation level of the wine. Controlling for the natural endogeneity of the collective reputation in this setup, we capture the important fact that this relationship is faced with marginal diminishing returns. These spillover effects, when significantly positive, vary from a minimum of 5% to a maximum of 15% of additional favorable quality opinions. We then show that some subregions are more likely to benefit from generic promotion programs, suggesting that fees should be established on a benefit-cost basis.

This document derives Kelly's rule for optimal bet sizing.
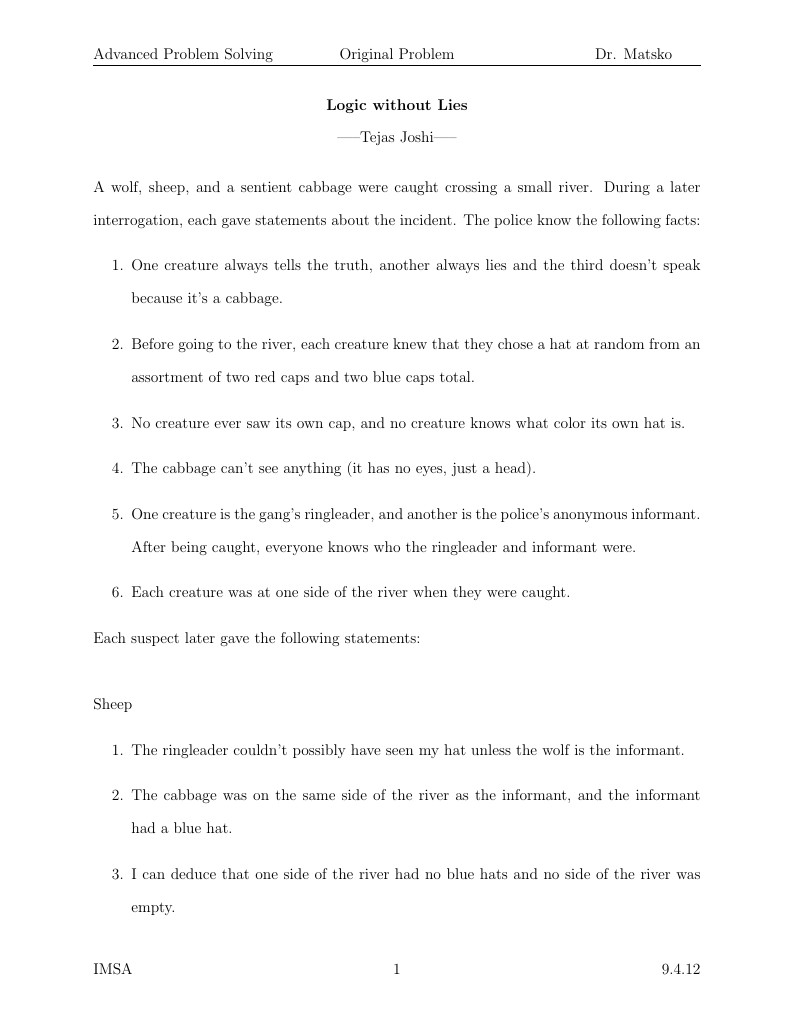
Cute logic puzzle.
Multivariate analysis