Overleaf 模板库LaTeX 模板和示例 — Recent
探索 LaTeX 模板和示例,以帮助完成从撰写期刊文章到使用特定 LaTeX 包的所有工作。
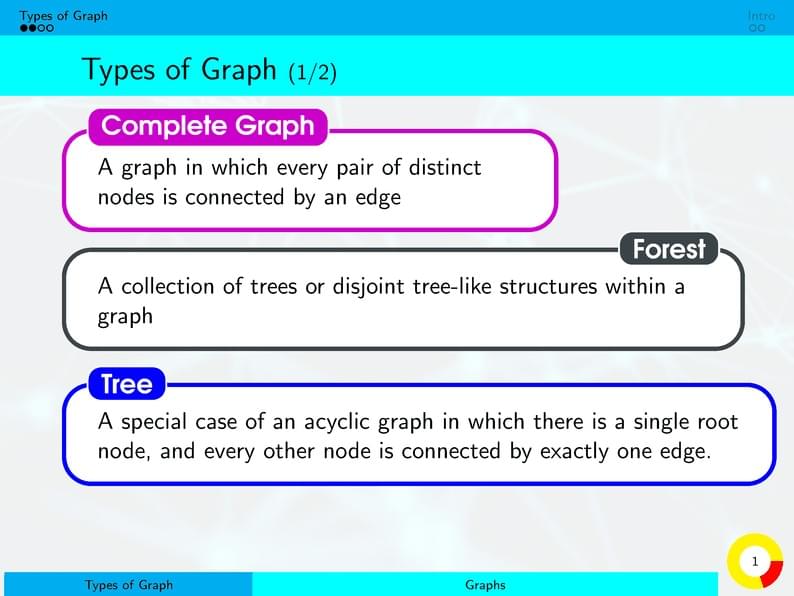
This is a beautiful color-rich beamer template. This is an advance template where I have various complicated concepts ( so not for beginners ).
Template para Monografia IFSP - Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Câmpus São João da Boa Vista Desenvolvido por Prof. Dr. David Buzatto

Beamer template for the CEA. The French Alternative Energies and Atomic Energy Commission (Commissariat à l'énergie atomique et aux énergies alternatives). This template was originally published on ShareLaTeX and subsequently moved to Overleaf in December 2019.
Template para Relatório Técnico IFSP - Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Câmpus São João da Boa Vista Desenvolvido por Prof. Dr. David Buzatto
Template for Theses, Dissertations, and Honours Projects in Computing Science at the University of Aberdeen.

Aalborg University conference poster LaTeX template created by Jesper Kjær Nielsen. This template is based on baposter LaTeX class. This template was originally published on ShareLaTeX and subsequently moved to Overleaf in December 2019.

A simple and clean 2-page CV/Resume template, based on the "Modern CV/Resume template" by Habib Semouma. This template is provided free of change and without any warranty under a CC0/Public Domain License

We have based this SDSS template almost entirely on the template for the annual conference of the Association for Computational Linguistics (ACL). This template is for contributed paper submissions—Symposium on Data Science and Statistics (SDSS) 2020.
Modelo de Trabalho de Conclusão de Curso (TCC) para todos os cursos de engenharia da Escola Politécnica da Universidade Federal do Rio de Janeiro